I am a Mechanical Graduate student of class of 2020 and I like to design and build the things specially robots. I have an extensive background in Mechanical Design, Robot Kinematics and Dynamics, Computer Vision, Human-Robot Interaction and System Engineering. I am currently seeking employement in the Robotics space. Throughout my studies I have worked on various projects which are displayed below in the projects section.
Projects
Go throught my project section to view the technical areas that I've worked on.
My Journey
Are you excited about my story, look no further and proceed to my journey section.
Contact Me
If you are looking forward to get in touch with me, go to contact me section.
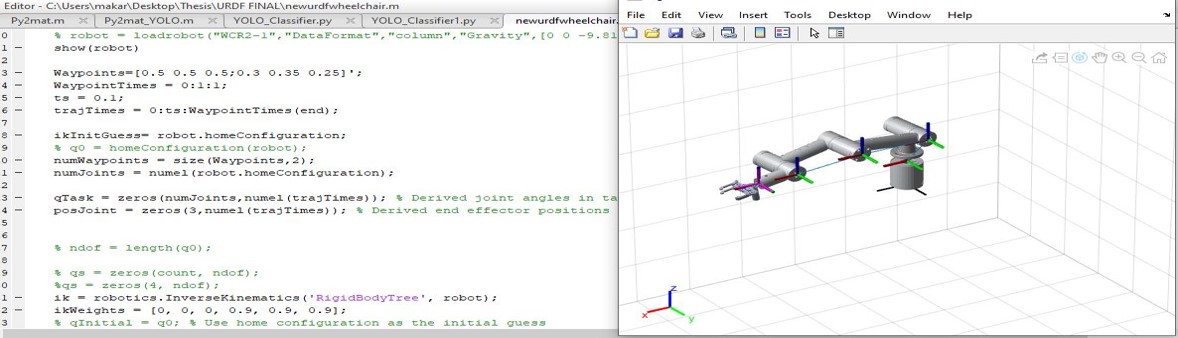
Dynamic Torque Analysis

Understanding System Engineering
Object Identification, Object Detection, Color Detection
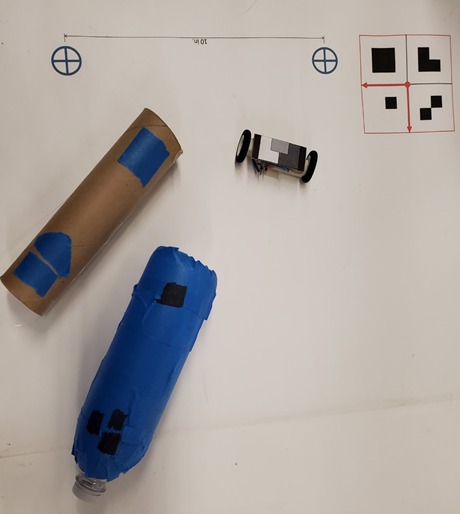
Pattern Matching, 2D Position and Orientation

Hand-eye Caliberation, Minimization Algorithm

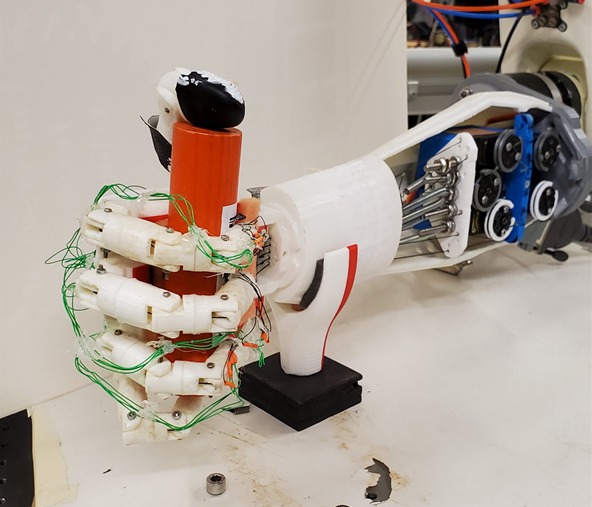
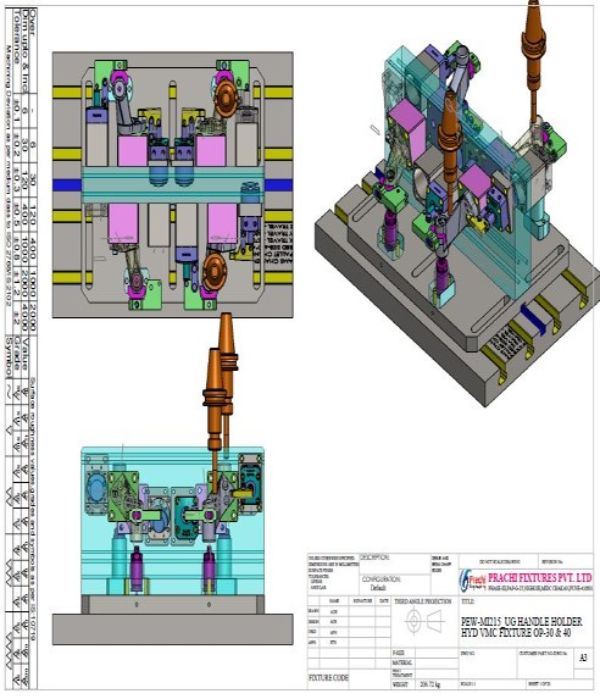
Prototype Design and Manufacturing
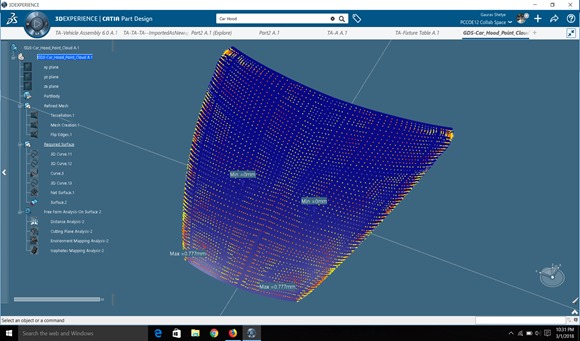
Generating a Class A Surface
Design Intern
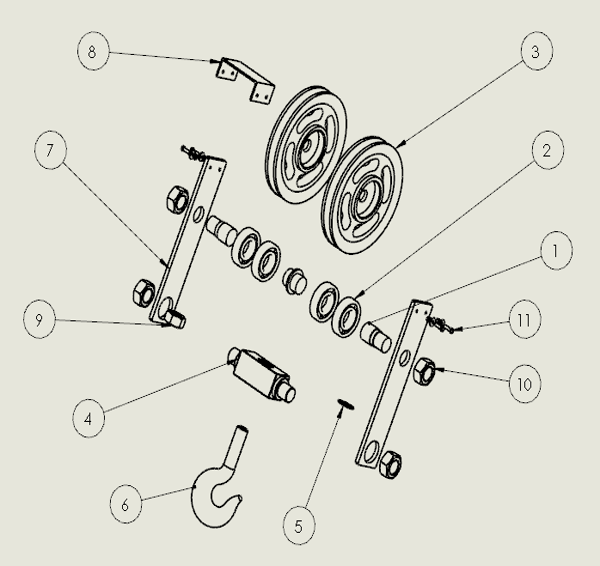
CAD Design
Trained Neural Network with Test Accuracy of 73.75%
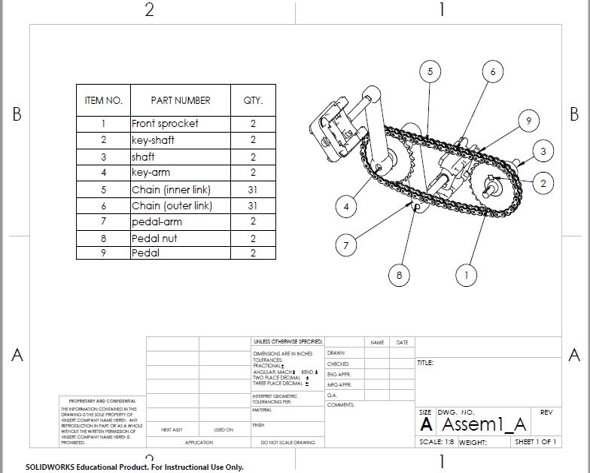
CAD Design

As a Graduate Research Assistant, in M.A.R.S. Lab, my work included dynamic torque calculations for actuators in a Wheelchair Mounted Robotic Arm (WMRA), identify position and position of objects in 2D and 3D, robot hand-eye caliberations and retrieving metadata for detected objects.
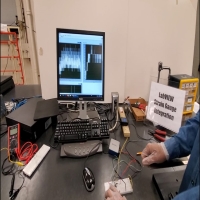
Starting August 2019, as a GTA and advancing into a part-time position through the year until the end of May 2020, my work at UTA includes teaching and assisting students with experimentation of various actuators, sensors, and electrical components.

Masters in Mechanical Engneering
In my masters degree I was more focused on robotics field with courses like Robotics, Control Systems, Neural Networks, and Manufacturing Processes which opened me to plathora of new technologies.

Bachelors in Mechanical Engineering
As a undergraduate student I honed my knowledge and understanding of mechanical field which was reflected with my senior year project and as well as research assistant in product innovation lab.
MATLAB
SolidWorks
CATIA
LabVIEW
NX
AutoCAD
Webots
Python
